- 欢迎来到 浩特工业!
- 010-5957 6240 028-8331 1885
- [email protected] | [email protected]
-


采矿设备无线遥控系统

概述:为了提高生产效率和保障安全,满足危险区域的采矿要求,确保人身安全,节约资源,提供资源回收率和经济效益,对于处于危险工作区的大型矿用机械设备,进行安全距离远程遥控操作尤为重要。基于无线通信技术和矿山无线遥控系统安全控制策略,针对矿用大型机械,我们提供专业远程遥控解决方案.操作人员携带带有视频显示的无线遥控器,距离矿用设备一定范围(100米)内,实现设备的各种功能动作。在可视遥控工作模式中,手柄操作单元和机车车载单元通过点对点方式直接建立专有通信链路,主要应用于现场可视范围内的遥控操作方式:
视频可视遥控系统包括FYF40矿用本安型遥控发送器、FYS40矿用本安型车载无线接收器、液压系统单元、电气系统单元。
FYF40矿用本安型遥控发送器

矿安证:KFA140027
煤安证:MFA130295
工作电压:DC12.8V
工作电流:< 100mA
无线通信距离:大于100m
电池类型:矿用磷酸铁锂电池组
电池容量:1400mA
接口配置:12路模拟输入、32路数字输入、CAN/RS485
无线通信频率:433MHz/915MHz/2.4GHz
传输速率:1Mbps
显示屏尺寸:7/9英寸
摄像头:IP69K、防水、防震
FYS40矿用本安型车载无线接收器
矿安证:KFA140027
煤安证:MFA130295
工作电压:DC 24V
工作电流: < 100mA(无负载)
无线通信距离:大于100m
无线通信频率:433MHz/915MHz/2.4GHz
传输速率:1Mbps
接口配置:32路输出(模拟/数字),5路DI,4路AI,1路CAN,1路RS485
液压系统单元


液压系统选用SUN、力士乐、诺顿等国际品牌。液压系统单元包括比例和开关电磁阀、管接口、管路和三通等附属配件。液压系统单元配合车载接收单元的输出控制,驱动机械的各种动作。例如:前进/后退、左转/右转、升/降大臂、装/卸物料、油门控制、刹车等。
电气系统单元


电气接口单元和机械上控制箱相连接,控制遥控系统电源的接通或者断开、前后灯、引擎启动、引擎保持等功能。同时,电气接口单元包含手动/遥控切换旋钮,从而控制铲运机工作在手动或者遥控模式状态下。
性能特点:
(1)无线遥控系统型号齐全,接口丰富,专业矿山设备遥控系统定制和旧矿山设备设计改装,可以满足各种类型机械遥控控制需求;
(2)产品允许在矿山领域使用,具有国家认证煤安证(MA)、矿安证(KA)、防爆证(Exd);
(3)完全自主知识产权,售后服务及时有效,一直被模仿,从未被超越;
(4)遥控和手控功能自由切换,既可用于危险区域进行无人操作出矿,又可满足一般采场正常使用。
(5)基于当前最先进的WLAN无线通信网络,即可实现点对点的视距遥控控制(不需要布设网络),也可以实现无通信距离限制的远程遥控;
主要应用:
采煤机、掘进机、矿用铲运机、矿用扒渣机、矿用钻机、矿用喷浆台车、矿用装载机、矿用撬毛台车、矿用凿岩台车,固定式液压破碎机等工作环境比较恶劣,对人身安全构成威胁的危险区域设备。扩展应用:挖掘机、扒渣机、起重机、装载机、混凝土机械、、盾构机等。应用领域:矿山、石油、铁路、航海、军事等。
可靠性与安全性
本方案在选用产品时充分考虑可靠、成熟的技术和产品,遥控器、接收器均具有国家认证矿安证。遥控器手柄采用德国原装进口手柄,液晶显示采用OLED可工作在恶劣环境下。设计的系统具有长期稳定运行的能力,安全可靠性高,有足够的抗干扰能力。充分考虑对关键设备、关键数据和逻辑链路的冗余备份, 以及系统自动故障检测、发现、报警和恢复功能,提高了系统可靠性。
开放性与标准化
系统采用开放式架构,选用标准化接口和协议,具有良好的可扩展性,系统建设遵守国家及行业标准与规范,考虑到系统在未来时间里可能的扩展、升级,主要设备和系统均具有良好的互联与互操作性。
先进性与实用性
系统采用国际先进的技术和理念进行设计,采用来自国内或国际知名厂商的硬件设备,系统的技术方案能够保持较长时期的先进地位,并能够适应将来的科技发展。结合相关业务部门的实际工作需求,注重系统的实用性。
扩展性与灵活性
系统采用结构化设计,构成方式简单,功能配置灵活,充分利用现有设备资源。系统控制部件采用模块化结构,无线通信采用蓝牙、WIFI等技术措施,系统在满足现有功能的基础上预留足够的设备容纳性。本系统以全新的数字化、网络化平台为特征,突出其在应用功能上的综合性、丰富性和扩展性,实现现代化、智能化、数字化、网络化管理;并且,应充足考虑系统建成后与其他系统进行无缝对接使用的可行性。本系统以全新的数字化、网络化平台为特征,突出其在应用功能上的综合性、丰富性和扩展性,实现现代化、智能化、数字化、网络化管理;并且,应充足考虑系统建成后与其他系统进行无缝对接使用的可行性。
超视距遥控

超视距遥控系统应用如图所示,图中,房子代表地面控制中心,黄色方块为无线基站。
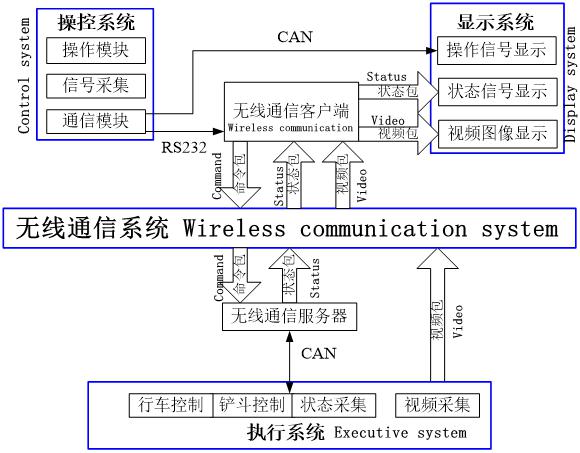
超视距遥控系统总体逻辑图如图所示,它是一个符合人机工程学的铲运机的远程操控台。也是中央控制室的一个重要组成部分。
超视距遥控系统总体逻辑图
在该操控台上搭建操控系统和监控系统。 通过操作台上的手柄等操作机构可以远程 控制铲运机的行驶和动作,操作员对操作 台上的各个旋钮、按钮以及手柄等进行必要的操作,这种操作动作经控制器编译后发送给上位机,再通过无线网络对铲运机的启动、变速、转向、油门及刹车进行遥控,使其按要求的速度和路线行驶,从而实现对铲运机的远程遥控和监控。同时,铲运机将前后路况的实时图像和运行参数视频信号通过无线网络实时传输到安装在操作台上的上位机显示屏上,使驾驶员可以实时远程掌握铲运机的真实驾驶环境,从而监控铲运机的运行情况,这样,铲运机、人(遥控驾驶员)以及遥控操控台(遥控操纵平台、无线路由、摄像机、控制系统等)就构成一个闭环控制系统。

整体功能列表
1. 通信网络:基于WLAN技术的无线MESH网络;
2. 遥控功能:由监控中心发送指令,遥控铲运机进行各种动作。包括前进、后退、油门、左转、右转、升臂、降臂、装料、卸料、驻车刹车、辅助刹车、灭火、引擎启动、快慢档、急停、前灯、后灯、喇叭及各种保护措施等,即目前视距遥控所具有的功能;
3. 视频监视:铲运机车头和车尾分别安装网络摄像头,用于远程监视工作环境,摄像头应具有防尘处理,其视频数据直接通过无线MESH网络上传到监控中心;
4. 出矿计量系统功能:能实时显示每次铲矿单斗的重量以及累积重量,便于统计司机每个班次、月和年的工作量;
5. 运行状态监测:由铲运机车载单元实时监测车辆运行状态,并上报给监控中心。状态信息包括:机油压力、机油油位、发动机温度、变速箱油温、变速箱油压、制动油压、制动油位、油箱油位、行驶里程、行驶时长、引擎工作状态、制动状态、空挡状态、铲运机前进、后退、油门、左转、右转、升臂、降臂、装料、卸料、刹车、灭火、引擎启动指示等;
6. 声光报警:当铲运机运行状态监测参数超过设定门限时,由车载单元发出声光报警,同时将报警上传给监控中心;
7. 行车运行记录:车载单元自动记录铲运机运行时的各种动作和状态,类似黑匣子功能,当铲运机出现故障时可通过串口直接读取。包括:机油压力、机油油位、发动机温度、变速箱油温、变速箱油压、制动油压、制动油位、油箱油位、行驶里程、行驶时长、引擎工作状态、制动状态、空挡状态、铲运机前进、后退、油门、左转、右转、升臂、降臂、装料、卸料、刹车、灭火、引擎启动指示等;
8. 车辆定位:在监控中心实时显示铲运机当前所处位置。
9. 路径学习:铲运机上安装模式切换开关(手动、学习、遥控),选择学习模式后,由操作人员驾驶铲运机在规划的道路上进行示范行驶,车载单元记录相关信息,以备自主导航时使用;
10. 自主导航:由监控中心发送指令,使铲运机工作在自主导航模式。自主导航时,铲运机车载单元根据学习的路径自主行驶,通过里程计判断行使距离,通过定位系统校正路线,通过转角传感器调整姿态,通过车头部位安装的激光扫描仪扫描识别路障及进行相应处理;自主导航时具有行驶安全区、报警区、危险停车区识别;
11. 人工干预:自主导航时允许人工干预,即通过监控中心发送人工干预指令,由车载单元解析命令并执行;
12. 工作模式:铲运机有多种运行工作模式,包括:手动控制、路径学习模式、遥控工作模式,这三种模式在铲运机上进行选择切换,当选择遥控模式时,可在监控中心选择是否使能自主导航模式、自动卸料模式;
联系我们
电话:028 83311885

















X
欢迎来到浩沃特!